
# A * 算法精讲 (A star算法)
卡码网:126. 骑士的攻击 (opens new window)
题目描述
在象棋中,马和象的移动规则分别是“马走日”和“象走田”。现给定骑士的起始坐标和目标坐标,要求根据骑士的移动规则,计算从起点到达目标点所需的最短步数。
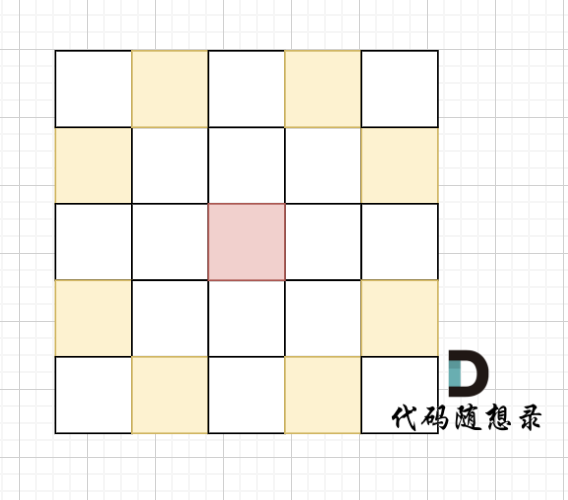
骑士移动规则如图,红色是起始位置,黄色是骑士可以走的地方。
棋盘大小 1000 x 1000(棋盘的 x 和 y 坐标均在 [1, 1000] 区间内,包含边界)
输入描述
第一行包含一个整数 n,表示测试用例的数量。
接下来的 n 行,每行包含四个整数 a1, a2, b1, b2,分别表示骑士的起始位置 (a1, a2) 和目标位置 (b1, b2)。
输出描述
输出共 n 行,每行输出一个整数,表示骑士从起点到目标点的最短路径长度。
输入示例
6
5 2 5 4
1 1 2 2
1 1 8 8
1 1 8 7
2 1 3 3
4 6 4 6
2
3
4
5
6
7
输出示例
2
4
6
5
1
0
2
3
4
5
6
# 思路
我们看到这道题目的第一个想法就是广搜,这也是最经典的广搜类型题目。
这里我直接给出广搜的C++代码:
#include<iostream>
#include<queue>
#include<string.h>
using namespace std;
int moves[1001][1001];
int dir[8][2]={-2,-1,-2,1,-1,2,1,2,2,1,2,-1,1,-2,-1,-2};
void bfs(int a1,int a2, int b1, int b2)
{
queue<int> q;
q.push(a1);
q.push(a2);
while(!q.empty())
{
int m=q.front(); q.pop();
int n=q.front(); q.pop();
if(m == b1 && n == b2)
break;
for(int i=0;i<8;i++)
{
int mm=m + dir[i][0];
int nn=n + dir[i][1];
if(mm < 1 || mm > 1000 || nn < 1 || nn > 1000)
continue;
if(!moves[mm][nn])
{
moves[mm][nn]=moves[m][n]+1;
q.push(mm);
q.push(nn);
}
}
}
}
int main()
{
int n, a1, a2, b1, b2;
cin >> n;
while (n--) {
cin >> a1 >> a2 >> b1 >> b2;
memset(moves,0,sizeof(moves));
bfs(a1, a2, b1, b2);
cout << moves[b1][b2] << endl;
}
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
提交后,大家会发现,超时了。
因为本题地图足够大,且 n 也有可能很大,导致有非常多的查询。
我们来看一下广搜的搜索过程,如图,红色是起点,绿色是终点,黄色是要遍历的点,最后从 起点 找到 达到终点的最短路径是棕色。
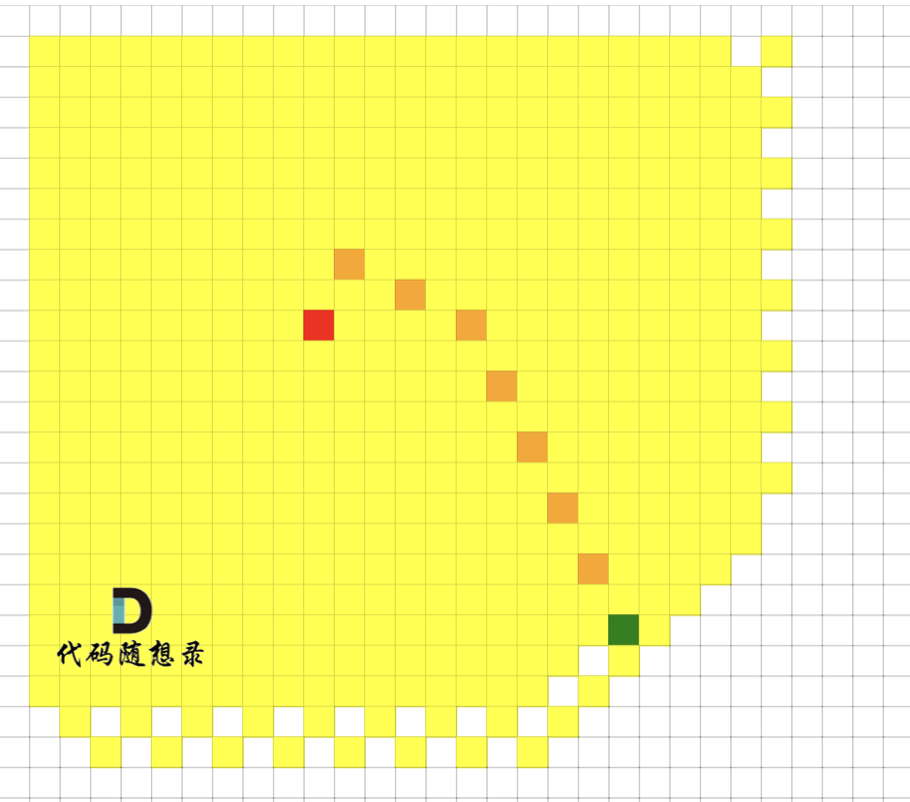
可以看出 广搜中,做了很多无用的遍历, 黄色的格子是广搜遍历到的点。
这里我们能不能让便利方向,向这终点的方向去遍历呢?
这样我们就可以避免很多无用遍历。
# Astar
Astar 是一种 广搜的改良版。 有的是 Astar是 dijkstra 的改良版。
其实只是场景不同而已 我们在搜索最短路的时候, 如果是无权图(边的权值都是1) 那就用广搜,代码简洁,时间效率和 dijkstra 差不多 (具体要取决于图的稠密)
如果是有权图(边有不同的权值),优先考虑 dijkstra。
而 Astar 关键在于 启发式函数, 也就是 影响 广搜或者 dijkstra 从 容器(队列)里取元素的优先顺序。
以下,我用BFS版本的A * 来进行讲解。
在BFS中,我们想搜索,从起点到终点的最短路径,要一层一层去遍历。
如果 使用A * 的话,其搜索过程是这样的,如图,图中着色的都是我们要遍历的点。

(上面两图中 最短路长度都是8,只是走的方式不同而已)
大家可以发现 BFS 是没有目的性的 一圈一圈去搜索, 而 A * 是有方向性的去搜索。
看出 A * 可以节省很多没有必要的遍历步骤。
为了让大家可以明显看到区别,我将 BFS 和 A * 制作成可视化动图,大家可以自己看看动图,效果更好。
地址:https://kamacoder.com/tools/knight.html
那么 A * 为什么可以有方向性的去搜索,它的如何知道方向呢?
其关键在于 启发式函数。
那么启发式函数落实到代码处,如果指引搜索的方向?
在本篇开篇中给出了BFS代码,指引 搜索的方向的关键代码在这里:
int m=q.front();q.pop();
int n=q.front();q.pop();
2
从队列里取出什么元素,接下来就是从哪里开始搜索。
所以 启发式函数 要影响的就是队列里元素的排序!
这是影响BFS搜索方向的关键。
对队列里节点进行排序,就需要给每一个节点权值,如何计算权值呢?
每个节点的权值为F,给出公式为:F = G + H
G:起点达到目前遍历节点的距离
H:目前遍历的节点到达终点的距离
起点达到目前遍历节点的距离 + 目前遍历的节点到达终点的距离 就是起点到达终点的距离。
本题的图是无权网格状,在计算两点距离通常有如下三种计算方式:
- 曼哈顿距离,计算方式: d = abs(x1-x2)+abs(y1-y2)
- 欧氏距离(欧拉距离) ,计算方式:d = sqrt( (x1-x2)^2 + (y1-y2)^2 )
- 切比雪夫距离,计算方式:d = max(abs(x1 - x2), abs(y1 - y2))
x1, x2 为起点坐标,y1, y2 为终点坐标 ,abs 为求绝对值,sqrt 为求开根号,
选择哪一种距离计算方式 也会导致 A * 算法的结果不同。
本题,采用欧拉距离才能最大程度体现 点与点之间的距离。
所以 使用欧拉距离计算 和 广搜搜出来的最短路的节点数是一样的。 (路径可能不同,但路径上的节点数是相同的)
我在制作动画演示的过程中,分别给出了曼哈顿、欧拉以及契比雪夫 三种计算方式下,A * 算法的寻路过程,大家可以自己看看看其区别。
动画地址:https://kamacoder.com/tools/knight.html
计算出来 F 之后,按照 F 的 大小,来选去出队列的节点。
可以使用 优先级队列 帮我们排好序,每次出队列,就是F最小的节点。
实现代码如下:(启发式函数 采用 欧拉距离计算方式)
#include<iostream>
#include<queue>
#include<string.h>
using namespace std;
int moves[1001][1001];
int dir[8][2]={-2,-1,-2,1,-1,2,1,2,2,1,2,-1,1,-2,-1,-2};
int b1, b2;
// F = G + H
// G = 从起点到该节点路径消耗
// H = 该节点到终点的预估消耗
struct Knight{
int x,y;
int g,h,f;
bool operator < (const Knight & k) const{ // 重载运算符, 从小到大排序
return k.f < f;
}
};
priority_queue<Knight> que;
int Heuristic(const Knight& k) { // 欧拉距离
return (k.x - b1) * (k.x - b1) + (k.y - b2) * (k.y - b2); // 统一不开根号,这样可以提高精度
}
void astar(const Knight& k)
{
Knight cur, next;
que.push(k);
while(!que.empty())
{
cur=que.top(); que.pop();
if(cur.x == b1 && cur.y == b2)
break;
for(int i = 0; i < 8; i++)
{
next.x = cur.x + dir[i][0];
next.y = cur.y + dir[i][1];
if(next.x < 1 || next.x > 1000 || next.y < 1 || next.y > 1000)
continue;
if(!moves[next.x][next.y])
{
moves[next.x][next.y] = moves[cur.x][cur.y] + 1;
// 开始计算F
next.g = cur.g + 5; // 统一不开根号,这样可以提高精度,马走日,1 * 1 + 2 * 2 = 5
next.h = Heuristic(next);
next.f = next.g + next.h;
que.push(next);
}
}
}
}
int main()
{
int n, a1, a2;
cin >> n;
while (n--) {
cin >> a1 >> a2 >> b1 >> b2;
memset(moves,0,sizeof(moves));
Knight start;
start.x = a1;
start.y = a2;
start.g = 0;
start.h = Heuristic(start);
start.f = start.g + start.h;
astar(start);
while(!que.empty()) que.pop(); // 队列清空
cout << moves[b1][b2] << endl;
}
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
# 复杂度分析
A * 算法的时间复杂度 其实是不好去量化的,因为他取决于 启发式函数怎么写。
最坏情况下,A * 退化成广搜,算法的时间复杂度 是 O(n * 2),n 为节点数量。
最佳情况,是从起点直接到终点,时间复杂度为 O(dlogd),d 为起点到终点的深度。
因为在搜索的过程中也需要堆排序,所以是 O(dlogd)。
实际上 A * 的时间复杂度是介于 最优 和最坏 情况之间, 可以 非常粗略的认为 A * 算法的时间复杂度是 O(nlogn) ,n 为节点数量。
A * 算法的空间复杂度 O(b ^ d) ,d 为起点到终点的深度,b 是 图中节点间的连接数量,本题因为是无权网格图,所以 节点间连接数量为 4。
# 拓展
如果本题大家使用 曼哈顿距离 或者 切比雪夫距离 计算的话,可以提交试一试,有的最短路结果是并不是最短的。
原因也是 曼哈顿 和 切比雪夫这两种计算方式在 本题的网格地图中,都没有体现出点到点的真正距离!
可能有些录友找到类似的题目,例如 poj 2243 (opens new window),使用 曼哈顿距离 提交也过了, 那是因为题目中的地图太小了,仅仅是一张 8 * 8的地图,根本看不出来 不同启发式函数写法的区别。
A * 算法 并不是一个明确的最短路算法,A * 算法搜的路径如何,完全取决于 启发式函数怎么写。
A * 算法并不能保证一定是最短路,因为在设计 启发式函数的时候,要考虑 时间效率与准确度之间的一个权衡。
虽然本题中,A * 算法得到是最短路,也是因为本题 启发式函数 和 地图结构都是最简单的。
例如在游戏中,在地图很大、不同路径权值不同、有障碍 且多个游戏单位在地图中寻路的情况,如果要计算准确最短路,耗时很大,会给玩家一种卡顿的感觉。
而真实玩家在玩游戏的时候,并不要求一定是最短路,次短路也是可以的 (玩家不一定能感受出来,及时感受出来也不是很在意),只要奔着目标走过去 大体就可以接受。
所以 在游戏开发设计中,保证运行效率的情况下,A * 算法中的启发式函数 设计往往不是最短路,而是接近最短路的 次短路设计。
大家如果玩 LOL,或者 王者荣耀 可以回忆一下:如果 从很远的地方点击 让英雄直接跑过去 是 跑的路径是不靠谱的,所以玩家们才会在 距离英雄尽可能近的位置去点击 让英雄跑过去。
# A * 的缺点
大家看上述 A * 代码的时候,可以看到 我们想 队列里添加了很多节点,但真正从队列里取出来的 仅仅是 靠启发式函数判断 距离终点最近的节点。
相对了 普通BFS,A * 算法只从 队列里取出 距离终点最近的节点。
那么问题来了,A * 在一次路径搜索中,大量不需要访问的节点都在队列里,会造成空间的过度消耗。
IDA * 算法 对这一空间增长问题进行了优化,关于 IDA * 算法,本篇不再做讲解,感兴趣的录友可以自行找资料学习。
另外还有一种场景 是 A * 解决不了的。
如果题目中,给出 多个可能的目标,然后在这多个目标中 选择最近的目标,这种 A * 就不擅长了, A * 只擅长给出明确的目标 然后找到最短路径。
如果是多个目标找最近目标(特别是潜在目标数量很多的时候),可以考虑 Dijkstra ,BFS 或者 Floyd。
# 其他语言版本
# Java
# Python
import heapq
n = int(input())
moves = [(1, 2), (2, 1), (-1, 2), (2, -1), (1, -2), (-2, 1), (-1, -2), (-2, -1)]
def distance(a, b):
return ((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2) ** 0.5
def bfs(start, end):
q = [(distance(start, end), start)]
step = {start: 0}
while q:
d, cur = heapq.heappop(q)
if cur == end:
return step[cur]
for move in moves:
new = (move[0] + cur[0], move[1] + cur[1])
if 1 <= new[0] <= 1000 and 1 <= new[1] <= 1000:
step_new = step[cur] + 1
if step_new < step.get(new, float('inf')):
step[new] = step_new
heapq.heappush(q, (distance(new, end) + step_new, new))
return False
for _ in range(n):
a1, a2, b1, b2 = map(int, input().split())
print(bfs((a1, a2), (b1, b2)))
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
# Go
# Rust
# JavaScript
class MinHeap {
constructor() {
this.val = []
}
push(val) {
this.val.push(val)
if (this.val.length > 1) {
this.bubbleUp()
}
}
bubbleUp() {
let pi = this.val.length - 1
let pp = Math.floor((pi - 1) / 2)
while (pi > 0 && this.val[pp][0] > this.val[pi][0]) {
;[this.val[pi], this.val[pp]] = [this.val[pp], this.val[pi]]
pi = pp
pp = Math.floor((pi - 1) / 2)
}
}
pop() {
if (this.val.length > 1) {
let pp = 0
let pi = this.val.length - 1
;[this.val[pi], this.val[pp]] = [this.val[pp], this.val[pi]]
const min = this.val.pop()
if (this.val.length > 1) {
this.sinkDown(0)
}
return min
} else if (this.val.length == 1) {
return this.val.pop()
}
}
sinkDown(parentIdx) {
let pp = parentIdx
let plc = pp * 2 + 1
let prc = pp * 2 + 2
let pt = pp // temp pointer
if (plc < this.val.length && this.val[pp][0] > this.val[plc][0]) {
pt = plc
}
if (prc < this.val.length && this.val[pt][0] > this.val[prc][0]) {
pt = prc
}
if (pt != pp) {
;[this.val[pp], this.val[pt]] = [this.val[pt], this.val[pp]]
this.sinkDown(pt)
}
}
}
const moves = [
[1, 2],
[2, 1],
[-1, -2],
[-2, -1],
[-1, 2],
[-2, 1],
[1, -2],
[2, -1]
]
function dist(a, b) {
return ((a[0] - b[0])**2 + (a[1] - b[1])**2)**0.5
}
function isValid(x, y) {
return x >= 1 && y >= 1 && x < 1001 && y < 1001
}
function bfs(start, end) {
const step = new Map()
step.set(start.join(" "), 0)
const q = new MinHeap()
q.push([dist(start, end), start[0], start[1]])
while(q.val.length) {
const [d, x, y] = q.pop()
// if x and y correspond to end position output result
if (x == end[0] && y == end[1]) {
console.log(step.get(end.join(" ")))
break;
}
for (const [dx, dy] of moves) {
const nx = dx + x
const ny = dy + y
if (isValid(nx, ny)) {
const newStep = step.get([x, y].join(" ")) + 1
const newDist = dist([nx, ny], [...end])
const s = step.get([nx, ny].join(" ")) ?
step.get([nx, ny]) :
Number.MAX_VALUE
if (newStep < s) {
q.push(
[
newStep + newDist,
nx,
ny
]
)
step.set([nx, ny].join(" "), newStep)
}
}
}
}
}
async function main() {
const rl = require('readline').createInterface({ input: process.stdin })
const iter = rl[Symbol.asyncIterator]()
const readline = async () => (await iter.next()).value
const n = Number((await readline()))
// find min step
for (let i = 0 ; i < n ; i++) {
const [s1, s2, t1, t2] = (await readline()).split(" ").map(Number)
bfs([s1, s2], [t1, t2])
}
}
main()
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
# TypeScript
# PhP
# Swift
# Scala
# C#
# Dart
# C
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
// 定义一个结构体,表示棋盘上骑士的位置和相关的 A* 算法参数
typedef struct {
int x, y; // 骑士在棋盘上的坐标
int g; // 从起点到当前节点的实际消耗
int h; // 从当前节点到目标节点的估计消耗(启发式函数值)
int f; // 总的估计消耗(f = g + h)
} Knight;
#define MAX_HEAP_SIZE 2000000 // 假设优先队列的最大容量
// 定义一个优先队列,使用最小堆来实现 A* 算法中的 Open 列表
typedef struct {
Knight data[MAX_HEAP_SIZE];
int size;
} PriorityQueue;
// 初始化优先队列
void initQueue(PriorityQueue *pq) {
pq->size = 0;
}
// 将骑士节点插入优先队列
void push(PriorityQueue *pq, Knight k) {
if (pq->size >= MAX_HEAP_SIZE) {
// 堆已满,无法插入新节点
return;
}
int i = pq->size++;
pq->data[i] = k;
// 上滤操作,维护最小堆的性质,使得 f 值最小的节点在堆顶
while (i > 0) {
int parent = (i - 1) / 2;
if (pq->data[parent].f <= pq->data[i].f) {
break;
}
// 交换父节点和当前节点
Knight temp = pq->data[parent];
pq->data[parent] = pq->data[i];
pq->data[i] = temp;
i = parent;
}
}
// 从优先队列中弹出 f 值最小的骑士节点
Knight pop(PriorityQueue *pq) {
Knight min = pq->data[0];
pq->size--;
pq->data[0] = pq->data[pq->size];
// 下滤操作,维护最小堆的性质
int i = 0;
while (1) {
int left = 2 * i + 1;
int right = 2 * i + 2;
int smallest = i;
if (left < pq->size && pq->data[left].f < pq->data[smallest].f) {
smallest = left;
}
if (right < pq->size && pq->data[right].f < pq->data[smallest].f) {
smallest = right;
}
if (smallest == i) {
break;
}
// 交换当前节点与最小子节点
Knight temp = pq->data[smallest];
pq->data[smallest] = pq->data[i];
pq->data[i] = temp;
i = smallest;
}
return min;
}
// 判断优先队列是否为空
int isEmpty(PriorityQueue *pq) {
return pq->size == 0;
}
// 启发式函数:计算从当前位置到目标位置的欧几里得距离的平方(避免开方,提高效率)
int heuristic(int x, int y, int goal_x, int goal_y) {
int dx = x - goal_x;
int dy = y - goal_y;
return dx * dx + dy * dy; // 欧几里得距离的平方
}
// 用于记录从起点到棋盘上每个位置的最小移动次数
int moves[1001][1001];
// 骑士在棋盘上的8个可能移动方向
int dir[8][2] = {
{-2, -1}, {-2, 1}, {-1, 2}, {1, 2},
{2, 1}, {2, -1}, {1, -2}, {-1, -2}
};
// 使用 A* 算法寻找从起点到目标点的最短路径
int astar(int start_x, int start_y, int goal_x, int goal_y) {
PriorityQueue pq;
initQueue(&pq);
// 初始化 moves 数组,-1 表示未访问过的位置
memset(moves, -1, sizeof(moves));
moves[start_x][start_y] = 0; // 起点位置的移动次数为 0
// 初始化起始节点
Knight start;
start.x = start_x;
start.y = start_y;
start.g = 0;
start.h = heuristic(start_x, start_y, goal_x, goal_y);
start.f = start.g + start.h; // 总的估计消耗
push(&pq, start); // 将起始节点加入优先队列
while (!isEmpty(&pq)) {
Knight current = pop(&pq); // 取出 f 值最小的节点
// 如果已经到达目标位置,返回所需的最小移动次数
if (current.x == goal_x && current.y == goal_y) {
return moves[current.x][current.y];
}
// 遍历当前节点的所有可能移动方向
for (int i = 0; i < 8; i++) {
int nx = current.x + dir[i][0];
int ny = current.y + dir[i][1];
// 检查新位置是否在棋盘范围内且未被访问过
if (nx >= 1 && nx <= 1000 && ny >= 1 && ny <= 1000 && moves[nx][ny] == -1) {
moves[nx][ny] = moves[current.x][current.y] + 1; // 更新移动次数
// 创建新节点,表示骑士移动到的新位置
Knight neighbor;
neighbor.x = nx;
neighbor.y = ny;
neighbor.g = current.g + 5; // 每次移动的消耗为 5(骑士移动的距离平方)
neighbor.h = heuristic(nx, ny, goal_x, goal_y);
neighbor.f = neighbor.g + neighbor.h;
push(&pq, neighbor); // 将新节点加入优先队列
}
}
}
return -1; // 如果无法到达目标位置,返回 -1
}
int main() {
int n;
scanf("%d", &n);
while (n--) {
int a1, a2, b1, b2; // 起点和目标点的坐标
scanf("%d %d %d %d", &a1, &a2, &b1, &b2);
int result = astar(a1, a2, b1, b2); // 使用 A* 算法计算最短路径
printf("%d\n", result); // 输出最小移动次数
}
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
评论
验证登录状态...